 Tweet
Tweet
Published on Dec 17, 2013
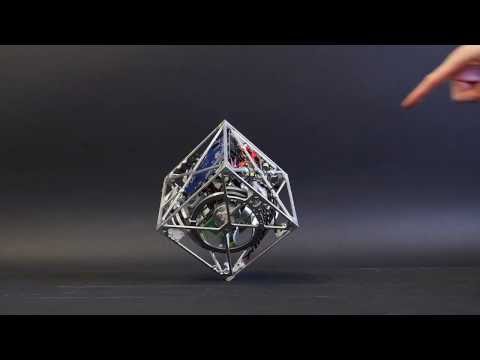
The Cubli is a 15 × 15 × 15 cm cube that can jump up and balance on its corner. Reaction wheels mounted on three faces of the cube rotate at high angular velocities and then brake suddenly, causing the Cubli to jump up.
Once the Cubli has almost reached the corner stand up position, controlled motor torques are applied to make it balance on its corner. In addition to balancing, the motor torques can also be used to achieve a controlled fall such that the Cubli can be commanded to fall in any arbitrary direction. Combining these three abilities -- jumping up, balancing, and controlled falling -- the Cubli is able to 'walk'.
Lead Researchers: Gajamohan Mohanarajah and Raffaello D'Andrea
This work was done at the Institute for Dynamic Systems and Control, ETH Zurich, Switzerland and was funded in part by the Swiss National Science Foundation (SNSF), grant number 146717.
For more details visit:
http://www.idsc.ethz.ch/Research_DAndrea/Cubli
Other links:
http://robohub.org/swiss-robots-cubl...oss-your-desk/
Update by Gajamohan Mohanarajah
A shout out to those who think it is a gyroscope. It is not. In a gyroscope the wheel spins at a high angular velocity to keep the orientation constant. In the Cubli, the controller, in addition to keeping the structure upright, also tries to bring the wheel velocities to zero. The controller uses the concept of reaction torque, a torque that the structure 'feels', when the motors attached to the structure accelerate/decelerate the wheels (Newton's third law of motion).
And why reaction torques are better? They are more responsive towards external disturbances and keeping the wheel velocity around zero reduces a lot of vibration and noise, especially on the sensors.
Finally, we use Cubli as a testbed to develop new control and estimation algorithms that can be generalized to many other systems from air planes to ships. (it is also a fun toy ). For a cool application of the Cubli itself check out this awesome concept from Prof. Pavone (Stanford)
). For a cool application of the Cubli itself check out this awesome concept from Prof. Pavone (Stanford)
http://www.stanford.edu/~pavone/niac.html
Hope you enjoyed the video!
The Cubli is a 15 × 15 × 15 cm cube that can jump up and balance on its corner. Reaction wheels mounted on three faces of the cube rotate at high angular velocities and then brake suddenly, causing the Cubli to jump up.
Once the Cubli has almost reached the corner stand up position, controlled motor torques are applied to make it balance on its corner. In addition to balancing, the motor torques can also be used to achieve a controlled fall such that the Cubli can be commanded to fall in any arbitrary direction. Combining these three abilities -- jumping up, balancing, and controlled falling -- the Cubli is able to 'walk'.
Lead Researchers: Gajamohan Mohanarajah and Raffaello D'Andrea
This work was done at the Institute for Dynamic Systems and Control, ETH Zurich, Switzerland and was funded in part by the Swiss National Science Foundation (SNSF), grant number 146717.
For more details visit:
http://www.idsc.ethz.ch/Research_DAndrea/Cubli
Other links:
http://robohub.org/swiss-robots-cubl...oss-your-desk/
Update by Gajamohan Mohanarajah
A shout out to those who think it is a gyroscope. It is not. In a gyroscope the wheel spins at a high angular velocity to keep the orientation constant. In the Cubli, the controller, in addition to keeping the structure upright, also tries to bring the wheel velocities to zero. The controller uses the concept of reaction torque, a torque that the structure 'feels', when the motors attached to the structure accelerate/decelerate the wheels (Newton's third law of motion).
And why reaction torques are better? They are more responsive towards external disturbances and keeping the wheel velocity around zero reduces a lot of vibration and noise, especially on the sensors.
Finally, we use Cubli as a testbed to develop new control and estimation algorithms that can be generalized to many other systems from air planes to ships. (it is also a fun toy
). For a cool application of the Cubli itself check out this awesome concept from Prof. Pavone (Stanford) http://www.stanford.edu/~pavone/niac.html
Hope you enjoyed the video!
Comment